05.03.2024: Abschlusstreffen
Quelle: FiW
Am 05.03.2024 fand das Abschlusstreffen zum Projekt RiverCloud am Geodätischen Institut und Lehrstuhl für Bauinformatik & Geoinformationssysteme der RWTH Aachen statt. Die Projektpartner stellten die durchgeführten Arbeiten und die Ergebnisse dem Fördermittelgeber vor und gaben einen Ausblick auf mögliche Anwendungen und weitere sinnvolle Forschungsarbeiten. Das Technische Handbuch zum Tandemsystem steht hier zum Download bereit. Erfasste und aufbereitete Daten stehen über die Mobilithek des BMDV https://mobilithek.info/offers/546691681594810368 zur Verfügung. Den Abschlussbericht finden Sie hier .
27.11.2023: Kolloquium - UAV/USV-Tandemsystem für Management und Unterhaltung von Wasserstraßen
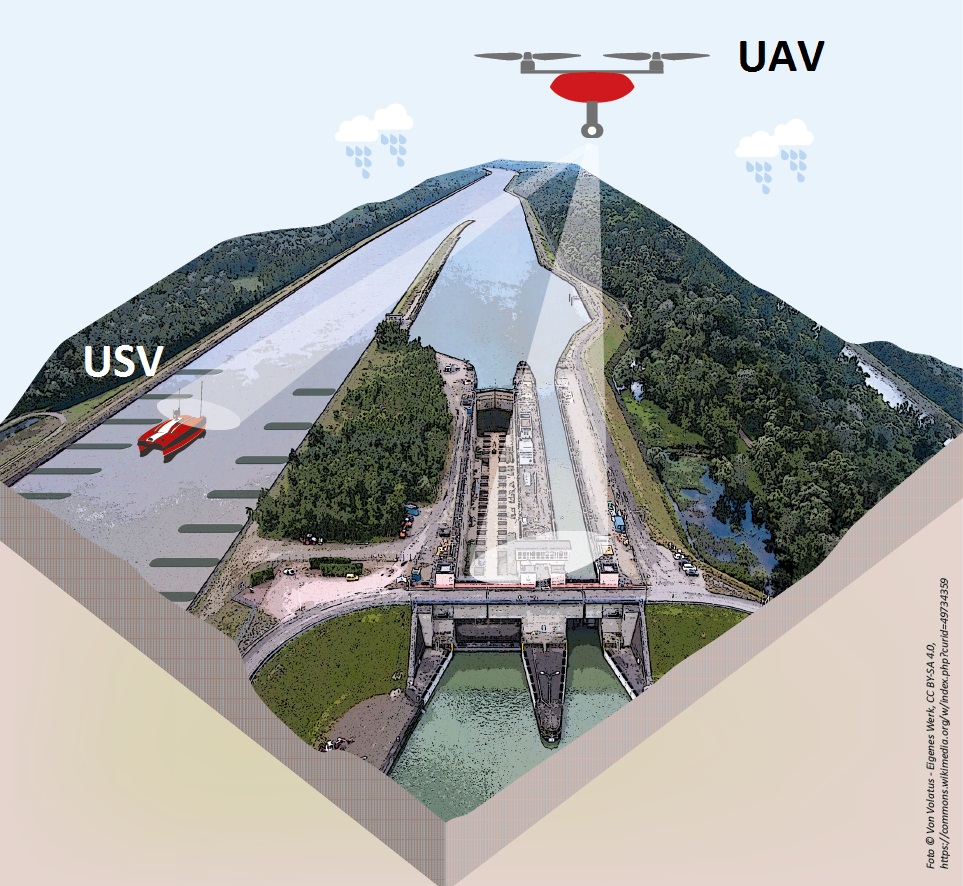
Im Projekt RiverCloud (http://rivercloud.org) wird eine autonomes und vernetztes Tandemsystems, bestehend aus UAV (Unmanned Aerial Vehicle) und USV (Unmanned Surface Vehicle), als Basis für die Erfassung und Bereitstellung von räumlich und zeitlich hochaufgelösten Daten zum Ausbau und der Unterhaltung von Wasserstraßen sowie zur Unterstützung des Gewässermanagements entwickelt. Die erhobenen Daten sollen durch Fusion mit vorhandenen, makroskaligen Daten analysiert und die Ergebnisse in die Modelle und Arbeitsabläufe der Nutzer aus der Wasserwirtschaft eingebunden werden. Verschiedene Fachdisziplinen wie die Wasser- und Schifffahrtsverwaltungen, Flussgebietsgemeinschaften oder Wasser- und Bodenverbände können auf der Grundlage der Daten beispielsweise gemeinschaftlich Maßnahmen zum Schutz von Gewässern entwickeln. Im Rahmen eines eintägigen Kolloquiums bei der Bundesanstalt für Wasserbau (BAW) am 27.11.2023 von 12:00 bis 17:00 Uhr in Karlsruhe sollen die Funktionsweise des Tandemsystems und die damit erfassten Daten sowie mögliche Anwendungen vorgestellt werden. Die Anwendungsmöglichkeiten sollen mit Akteuren aus der Wasserstraßen- und Schifffahrtsverwaltung, Flussgebietsgemeinschaften oder Wasser- und Bodenverbände, ISKR, Naturschutzverbände, Forschungseinrichtungen zum Wasserbau und Wassermanagement und weiteren potentiellen Nutzern diskutiert werden. Anmeldungen bitte bis Freitag, den 10.11.2023, an Frau Kristiina Leismann (E-Mail: kristiina.leismann@baw.de). Frau Leismann steht auch für Rückfragen gerne zur Verfügung.

Quelle: seba
13.07.2023 – RiverCloud Hackathon in der digitalChurch in Aachen

Quelle: FiW
Am 13.07.2003 fand in der digitalChurch in Aachen der RiverCloud Hackathon 2023 statt. Studierende entwickelten in kleinen Teams neue Konzepte und innovative Ideen zur Nutzung der mit der RiverCloud-Sensorik erfassten Daten für den Ausbau und die Unterhaltung von Wasserstraßen sowie zur Unterstützung des Gewässermanagements. Die Teams setzten sich aus Studierenden unterschiedlicher Studiengänge (Bauingenieurwesen, Umweltingenieurwesen, Angewandte Geografie, Maschinenbau) interdisziplinär zusammen. Sie starteten die Implementierung ihrer Ideen mit den in der mobilithek bereits öffentlich verfügbaren River-Cloud-Daten.
07.12.2022 – Workshop: Aufbereitung und Bereitstellung von RiverCloud-Daten
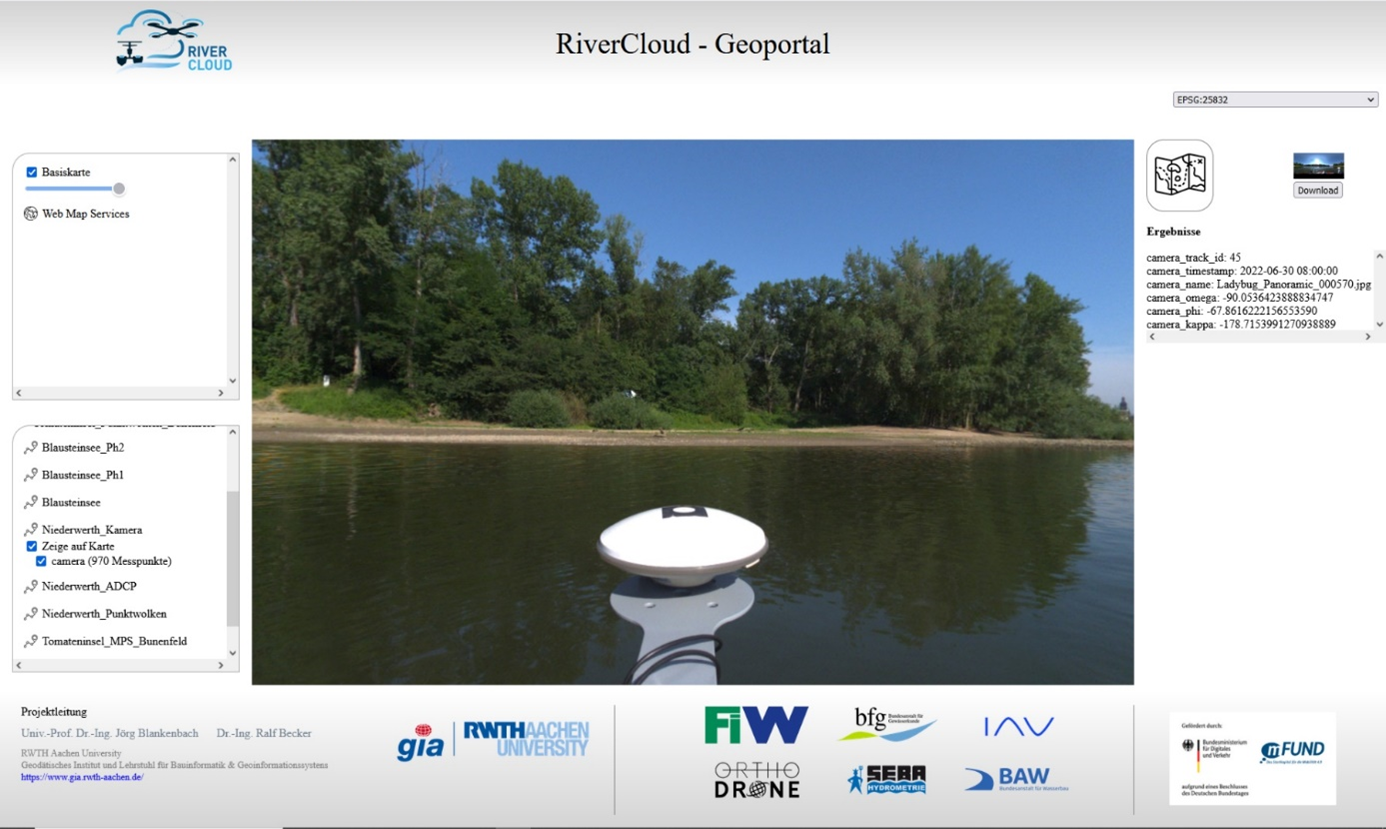
Im einem Online-Workshop am 07.12.2022 wurde einem breiten Teilnehmerspektrum aus der Wasserstraßen- und Schifffahrtsverwaltung, der Gewässerkunde sowie Ingenieurbüros zunächst die Erfassungssensorik des RiverCloud-Projekts sowie die Datenerfassung in den bisherigen drei Messkampagnen „Neue Schleuse Trier“, „Niederwerth“ und „Tomateninsel“ von den jeweiligen Projektpartnern vorgestellt. Die entstandenen Rohdaten und Datenprodukte sowie die Datenbereitstellung über ein Geoportal in der Mobilithek des Bundesministeriums für Digitales und Verkehr (BMDV) wurden gezeigt. Die vorgestellten Ergebnisse, mögliche weitere Anwendungsfälle und die Art der Bereitstellung der Daten in der Mobilithek wurden in zwei Gruppen („Digitale Geländemodelle des Wasserlaufs und hydrodynamisch-numerische Modelle“ und „Vegetationsstrukturen und Uferentwicklung“) mit den Teilnehmerinnen und Teilnehmern des Workshops diskutiert.
Quelle: gia
07. - 08.09.2022: Messkampagne Tomateninsel

Quelle: BAW
Am 07. und 08.09.2022 wurde eine Messkampagne auf dem Rhein bei Au am Rhein durchgeführt. Es erfolgten Echolot-, MPS- und ADCP-Messungen im Bunenfeld an der Tomateninsel und auf dem Illinger Altrhein am sogenannten Kohlkopf. Mit der Panoramakamera auf dem USV wie auch vom UAV aus wurde Bildmaterial von der Vegetationsstruktur im Uferbereich erfasst.
30.06.2022 – Messkampagne Niederwerth
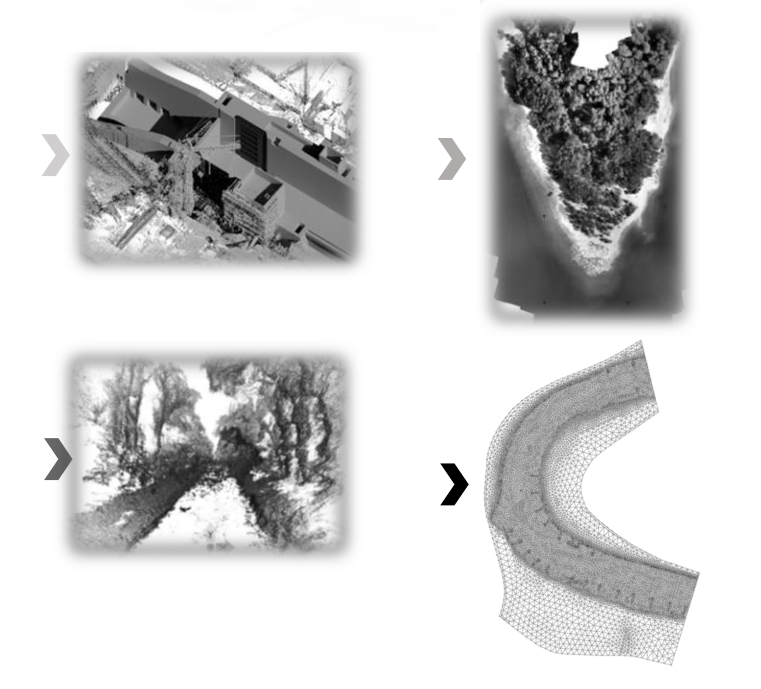
Am 30.06.2022 wurde an einem Rheinarm bei der Insel Niederwerth nördlich von Koblenz das USV eingesetzt. Mit verschiedenen Sensoren (einer Multiparametersonde (MPS), einem Acoustic Doppler Current Profiler (ADCP), einer aus sechs Einzelkameras bestehenden Panoramakamera (FLIR Ladybug 5) und einem Fächerecholot (MBES) konnte umfangreiches Datenmaterial erfasst werden. Dieses bildet die Basis für verschiedenste Auswertungen und Analysen z.B. zur Fließgeschwindigkeit, zur Wasserqualität, zur Über- und Unterwassertopographie (DGM-W) und zur Struktur der Ufervegetation. Zusätzliche Bilddaten lieferte eine im Juli 2022 durchgeführte Befliegung mit einem UAV.

Quelle: gia, Orthodrone
27.04.2022 - Workshop: Systematisierung der Anwendungsfälle und Nutzungsformen
Am 27.04.2022 fand ein Workshop „Systematisierung der Anwendungsfälle und Nutzungsformen“ statt. Der Workshop wurde online unter breiter Beteiligung von Teilnehmerinnen und Teilnehmern aus der Wasserstraßen- und Schifffahrtsverwaltung, Natur und Umwelt sowie Ingenieurbüros für Gewässer und Vegetation abgehalten. Nach der Vorstellung der Zielsetzungen des Projektes wurden in drei Kleingruppen zu den Themen „Bauwerke“, „Vegetationserfassung/Gewässerrand“ und „Topographie/Fließgeschwindigkeit“ mögliche Anwendungsfälle und Nutzungsformen für die erfassbaren Daten diskutiert.
01.02.2022 - Befliegung "Neue Schleuse Trier"

Am 01.02.2022 wurde die Neue Schleuse Trier im Rahmen einer Messkampagne durch den Projektpartner Orthodrone mit dem UAV beflogen. Es ist umfangreiches Bildmaterial entstanden, das nun für die weiteren Auswertungen im Projekt zur Verfügung steht.
30.11.2021 - 1. Testfahrt des USV
Auf dem Blausteinsee bei Langerwehe wurde die erste Testfahrt auf dem Wasser erfolgreich durchgeführt.

09.11.2021 - USV-Trägerplattform eingetroffen

Das USV ist jetzt eingertroffen und wird derzeit mit der geplanten Sensorik ausgerüstet. Erste Testfahrten sind noch für das Jahr 2021 in Planung.
06.10.2020 - 2. Statusseminar und Workshops

Quelle: BAW
Am 06.10.2020 fand in den Räumlichkeiten des Projektpartners IAV GmbH Ingenieurgesellschaft Auto und Verkehr in Gifhorn das zweite Statusseminar statt. Teilnehmer, die aus Gründen der Covid 19-Pandemie nicht persönlich anwesend sein konnten, wurden online zugeschaltet. Die Beteiligten stellten ihre Fortschritte in der Bearbeitung der Arbeitspaketes 1 zur Beschaffung und Aufrüstung der Trägerplattformen UAV und USV und sowie der Messtechnik vor. BAW und BfG stellten mögliche Untersuchungsgebiete im Hinblick auf die geplanten Anwendungsszenarien vor. Im Rahmen des Statusseminars wurden zudem Workshops zur Konfigurationen der Trägerplattformen im Hinblick auf die möglichen Anwendungsszenarien durchgeführt.

Quelle: Orthodrone und HydroSurv
01.06.2020 - Projektstart
Das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI) fördert im Rahmen der
Förderrichtlinie Modernitätsfonds („mFUND“) das Projekt RiverCloud zur Entwicklung eines
UAV/USV-Tandemsystems für die Geodatenerfassung, um Management und Unterhaltung von Wasserstraßen zu
unterstützen. Das Kooperationsprojekt mit sieben Partnern unter Leitung des Geodätischen Instituts
und Lehrstuhls für Bauinformatik & Geoinformationssysteme der RWTH Aachen hat ein Gesamtvolumen von
2,3 Mio. Euro und startet zum 1. Juni 2020.
Wasserstraßen haben u.a. vor dem Hintergrund der zunehmenden Urbanisierung und des Klimawandels eine
herausragende Bedeutung für den nationalen und internationalen Warenaustausch. Ihr Ausbau und ihre
Unterhaltung müssen im Einklang mit der Wasserrahmenrichtlinie und der
Hochwasserrisikomanagement-Richtlinie der Europäischen Union erfolgen. Die dafür benötigten
themenspezifischen Geometrie- und Sachdaten liegen jedoch derzeit nicht immer mit der erforderlichen
zeitlichen und räumlichen Auflösung vor.
Am 18.06.2020 fand als erstes Statusseminar das Kick-Off-Meeting mit allen Teilnehmern über eine
Online-Plattform statt.
Kernziele des Projekts sind die folgenden:
- Entwicklung eines autonomen UAV/USV-Tandemsystems
- Verbesserte Georeferenzierung durch Fusion unterschiedlicher Messsysteme (Global Navigation Satallite System - GNSS, Inertialmesseinheit - IMU, Visuelle Odometrie) mittels stochastischer Filter
- Workflows sowie GIS- und BIM-basierte Auswerteroutinen für die holistische Datenauswertung
- Exemplarische Anwendungen im Aufgabenbereich der BfG und BAW
- Bereitstellung der Ergebnisdaten dauerhaft in der mCloud und ggf. weiteren Datenportalen (z.B. BIM-Portal)